Autoritatea contractanta: Unitatea
Executivă pentru Finanțarea Învățământului Superior, a
Cercetării, Dezvoltării și Inovării (UEFISCDI)
Codul proiectului: PN-III-P2-2.1-PED-2019-2805
Tip proiect: Proiect
experimental – demonstrativ (PED)
Titlul proiectului: Inspectia scenelor subacvatice iluminate artficial folosind OpenROV Trident
Acronim: UW-ROV
Data inceperii proiectului: 01.11.2020
Data incheierii proiectului: 30.10.2022
Valoarea totală a contractului: 600.000
lei
Durata: 24 luni
Director proiect:
Dr. habil.
Ing. Cosmin Ancuti
Universitatea
Politehnica Timisoara,
Facultatea
de Electronica si Telecomunicatii, B312
Blvd.
Vasile Parvan 2, 300223, Timisoara, Romania
Email:
cosmin.ancuti@upt.ro
Tel: (+40)-0256-403363
Institutia coordonatoare:
Universitatea Politehnica Timisoara, Facultatea de Electronica si Telecomunicatii
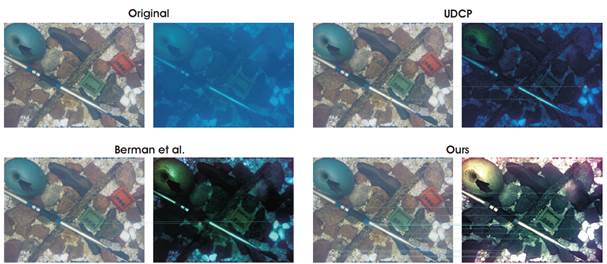
Figura 1: Rezultate pentru setul 5 din Deep Blue. Ne-am comparat cu tehnicile
subacvatice specializate ale lui
Drews-Jr et al. (UDCP) și Berman et al. Procesand perechea de
imagini originala (neprocesata) se obtin zero potriviri valide, pe imaginile
generate cu UDCP sunt 2 potriviri
corecte, pe rezultatele generate cu metoda propusa de Berman et al.
sunt 2 potriviri corecte iar pe rezultatele generate cu metoda propusa sunt 20 de potriviri corecte
Obiective Etapele I+II:
Obiectivul principal al acestor etape este de a dezvolta in prima faza o metoda eficienta de imbunatatire a vizibilitatii in imagini subacvatice. Asa cum a fost descris in propunerea de proiect am pornit de la un prototip publicat recent de directorul de proiect si echipa de cercetare. Apoi, am investigat diverse strategii/metode de a optimiza aceasta metoda pentru a se putea integra pe platforma Open ROV Trident (Raspeberry Pi). Pentru atingerea obiectivului propus am parcurs etapele descrise detaliat in raportul stiintifico-tehnic de etapa.
Raport stiintific Etapa I si II.
Obiectiv Etapa III:
Obiectivul principal al acestei etape a fost de a defini scenarii de laborator specifice pentru care metoda de imbunatatire a vizibilitatii in scene subacvatice (dezvoltata in etapa anterioara) sa fie testata atat calitativ dar si cantitativ in comparatie cu metode specializate.
Publicatii:
1. Arpad Kis, Horia Balta and Cosmin Ancuti,”Underwater image enhancement on low-cost
hardware platform”, IEEE ELMAR, Zadar, Croatia, septembrie 2021
2. Horia Balta and Codruta O. Ancuti and Cosmin Ancuti, „Effective underwater image restoration based on color channel compensation”, IEEE Oceans, San Diego, US, septembrie 2021
3.
M. Sbert, Cosmin Ancuti, Codruta O. Ancuti, J.
Poch, S. Chen, M. Vila, „Histogram Ordering”, IEEE Access 2021, revista ISI/WOS
4.
Arpad Kis, Horia
Balta and Cosmin Ancuti,” Effective restoration of underwater images to
improve local feature matching”, IEEE ELMAR, Zadar, Croatia, septembrie 2022